
无人机基于NOKOV动捕系统获取位置数据

AI-摘要
MGodのGPT
AI初始化中...
介绍自己
生成本文简介
推荐相关文章
前往主页
前往爱发电购买
无人机基于NOKOV动捕系统获取位置数据
MGodmonkey环境
机载电脑
- 系统:Ubuntu20.04 LST
- ROS1:noetic
- 飞控:PX4
- mavros
- QGroundControl
动捕系统电脑
- 动捕配套软件:XING-NOKOV
关于系统、PX4、mavros、QGroundContorl等安装参考下面两篇文章:
1. 准备工作
1.1 动捕系统电脑
打开动捕系统软件XING-NOKOV,进行如下操作
- 标定与贴点:数据采集前准备:标定与贴点 (xiaoeknow.com)
- 刚体创建:锁帧->shift键框选5个点->右键创建刚体,名称: Tracker0
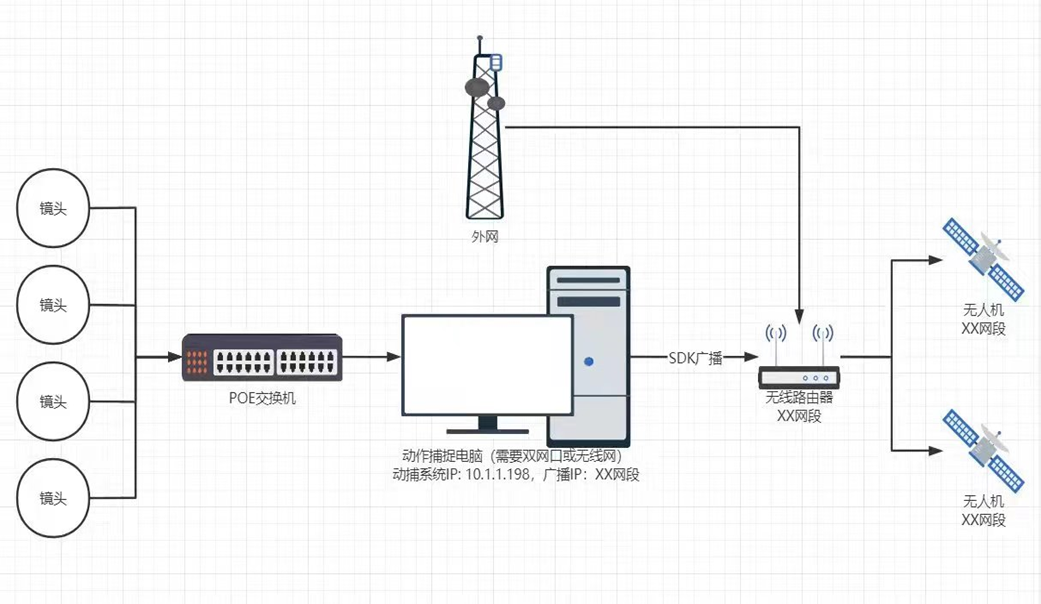
- 网络拓扑结构
1.2 机载电脑
通过ssh等工具连接上机载电脑,进行如下操作
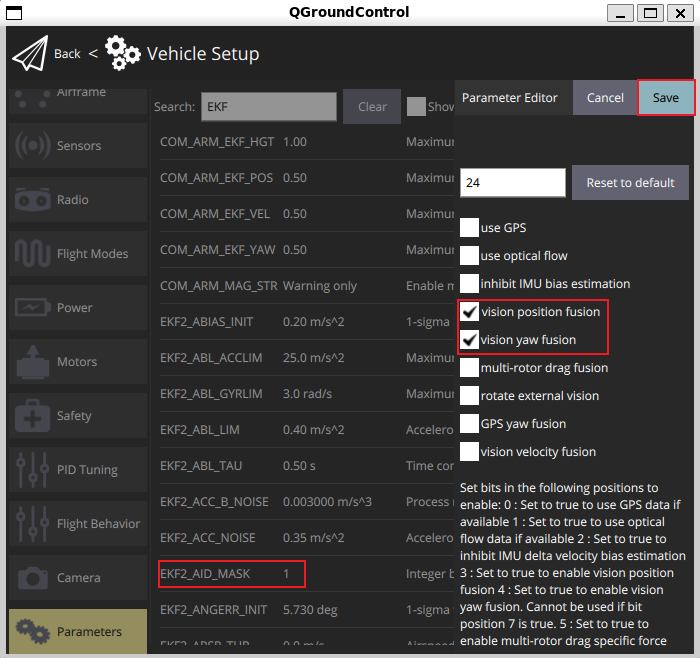
- 打开QGroundContorl连接上无人机飞控,并进行PX4的配置
EKF2_AID_MASK = 24
EKF2_HGT_MODE = 2
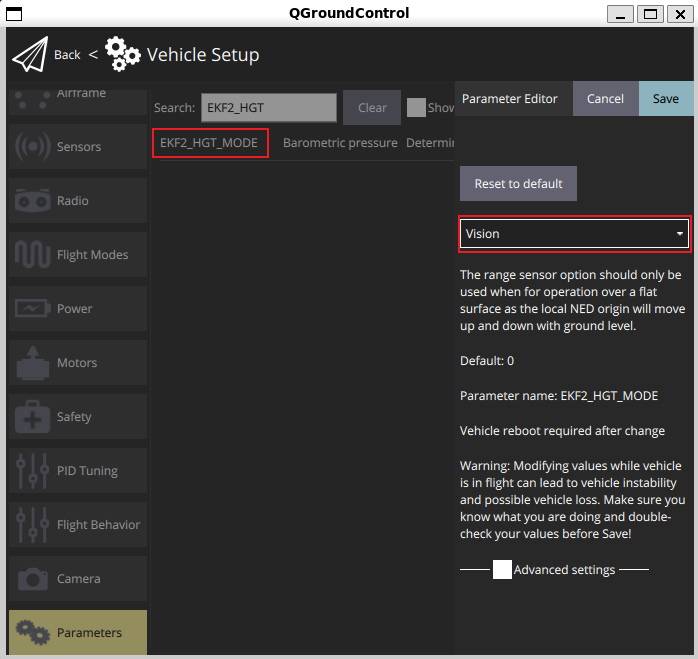
PX4配置需要保存后重启QGroundContorl后才能生效
- 安装VRPN
1 | sudo apt-get install ros-noetic-vrpn-client-ros # 这里的noetic要根据机载电脑的ros版本进行修改 |
2. 操作步骤
公众号视频参考:PX4系统配置与操作演示 (xiaoeknow.com)
-
通过VRPN将动捕数据广播出去
打开动捕系统软件XING-NOKOV->Setting->勾选VRPN Enabled,并选中刚体Tracker0->数据单位设置为meters
-
验证机载电脑是否能获取动捕数据,这里的10.1.1.198为动捕电脑IP
1
roslaunch vrpn_client_ros sample.launch server:=10.1.1.198
如果未能获取到数据,先通过
ping 10.1.1.198来检查是否存在网络问题
- 机载电脑上运行下面的命令来将动捕数据发送给地面站QGroundContorl,这里的10.1.1.150为运行QGroundContorl主机的IP地址,一般为自己笔记本电脑的IP地址
1 | roslaunch mavros px4.launch gcs_url:="udp://@10.1.1.150:14550" |
- 机载电脑上运行下面的命令来实现话题转发
1 | rosrun topic_tools relay /vrpn_client_node/Tracker1/pose /mavros/vision_pose/pose |
-
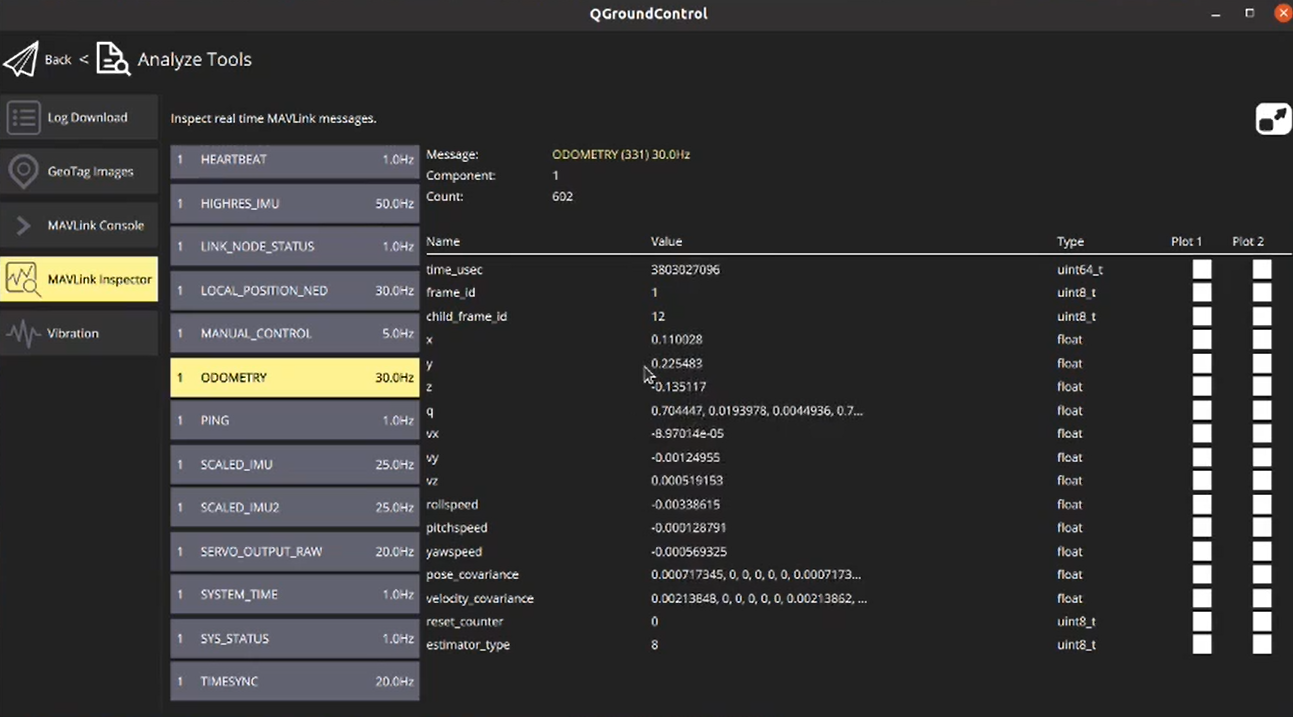
验证是否正常
- 查看动捕数据是否显示:AnalyzeTools -> MAVLINK Inspector -> VISION_POSITION_ESTIMATE/ODOMETRY

- 查看QGroundContorl中飞行模式是否能切换为定点模式
参考:
PX4官网: 利用视觉或运动捕捉系统进行位置估计
Nokov应用相关博客:
NOKOV github:https://github.com/NOKOV-MOCAP


喜欢这篇文章的人也看了






评论
匿名评论隐私政策
✅ 你无需删除空行,直接评论以获取最佳展示效果





